Design rationale

Max Gallup
Founding Member, Ex-Hardware Lead and Ex-Project Administrator
The Rover was designed from the ground up with the following two requirements in mind: researchability and performance. With researchability, we mean the ability to add, modify and easily adapt the Rover to the needs of the research. This meant that there must be enough space to mount more sensors and as many digital connections offered by the Debix must be easily accessible. In addition to this, the car was made performant by having powerful motors and a large battery for strong acceleration and deceleration (active breaking). This makes the car a potential candidate in student competitions such as the NXP Cup. Lastly, the assembly and manufacturing of the Rover should not be too complex to enable repairs by students with basic mechanics and soldering experience.
In the design, a separation was made between components that need to be readily accessible versus ones that are likely not change. In the following picture we can see everything below the blue line are the actuators and battery required to move the Rover. The bottom half is likely not to change over time so it is less accessible by design.
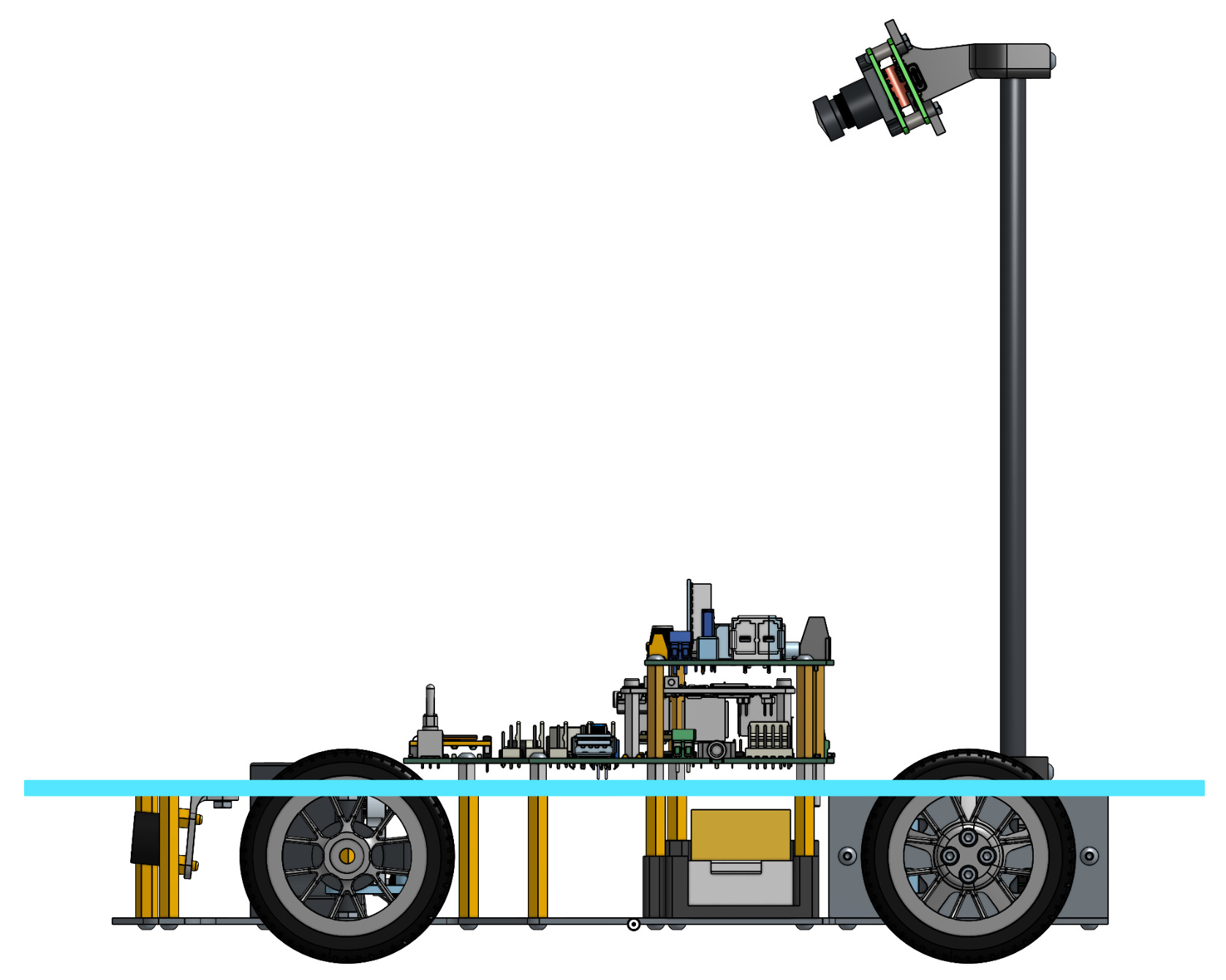
Conversely, the space above the blue line is meant to be accessible and offers the space and connectivity to expand the sensing capabilities of the Rover. The main processing computer of the Rover (the Debix) is mounted on the carrier board which provides filtered power to the whole system as well as exposing the data connections that the Debix comes with. Mounting holes were placed all around the top of the Rover to accommodate any potential additions to the system. Custom mounts can easily be mounted and added with custom 3D printed parts.
This design has reached its two goals of being performant as well as a suitable platform for research. The performance of the powerful hub motors as well as tight steering mechanism has enabled the ASE/Alpha to win first place in the 2024 NXP Cup Finals. Furthermore, a successful round of bachelor projects in 2024 showed that it can be used as a research platform. However, there is always room for improvement.